
新能源汽車電子控制系統的四大特征
2016-11-04
1.目的性
任何新能源汽車電子控制系統的目的都是為了解決與汽車功能要求有關的問題,而這些問題僅依靠通常的機械系統是難以解決的。例如ABS是為了保證車輛在易滑路面上行駛時的安全性;懸架控制用來改善新能源汽車的平順性、操縱性和穩定性;而動力轉向的目的是為了改善停車或低速駕駛時的轉向力以及保證在高速行駛時有路感。
總的來說,車輛電子控制系統主要是為了改善如下一些基本功能:
(1)改善乘坐舒適性??良好的乘坐舒適性應該是車輛在任何路面行駛時,無論法向和側向運動.顛簸和沖擊都較小,理想的情況是希望獲得像乘坐噴氣式客機在天空中飛行一樣舒適。
(2)車輛行駛時的姿態控制??控制車輛在轉向、制動和加速時的側傾、縱傾等運動.以保證駕駛員有舒適的車輛水平位置。
(3)保證有高的操縱性和穩定性??依靠電子控制系統,車輛能對駕駛員的操縱及時麗正確地給予響應,無論在何種速度下都能保證車輛的操縱性和穩定性:另外.車輛應不受側向風或路面不平度的干擾。
(4)提高行駛能力極限??汽車電子控制系統應在任何路面(u,不平度)和任何行駛工況(加速、制動和轉向)下實現大的輪胎與路面間的牽引力.
(5)自適應操縱系統??當作用在車輛上的慣性力超過輪胎與路面間的牽引力極限時,控制系統應能自動地給予轉向、制動或加速,以避免車輛進入危險狀態。
2.相關性
新能源汽車上各種電子控制系統往往是相互關聯的,如果不考慮這種相關性,任一控制系統都會出現非所預期的結果。例如車輛上的主動懸架,如果不考慮防滑制動系統的行為,就有可能在急剎車時導致車輛的上下起伏和縱向搖擺。這是因為主動懸架對防滑制動系統的波動是有反響的。又如主動懸架可以減小車輛側傾,可是卻破壞了四輪轉向系統(4WS)的橫擺響應。與此同時,若依靠4WS改善橫擺響應,則主動懸架的側傾收斂效果減弱。
3.層次性
新能源汽車電子控制系統是有層次的,一般可以分成三個層次,如圖1—5所示。層次是車輛綜合控制系統。第二層次是各個子系統,如制動控制系統、轉向控制系統、懸架控制系統和動力傳動裝置控制系統等。一輛車前后、左右四個制動裝置或四個懸架裝置的控制系統則屬于第三層次。
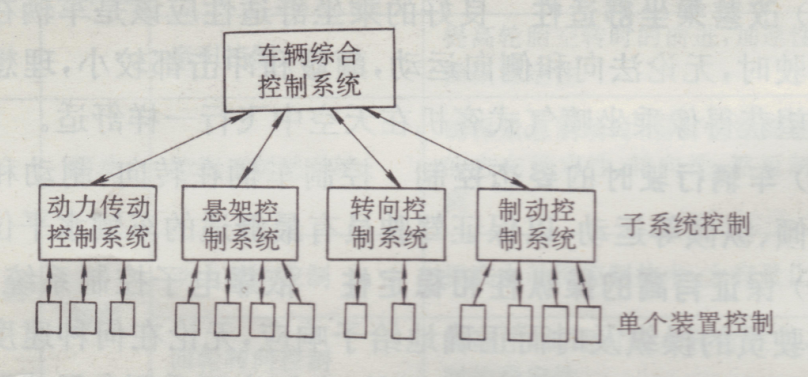
汽車電子控制系統的三個層次
目前都把人一車一環境系統控制看作一個單獨的控制層次,這樣和前面三個層次加在一起就成了四個層次。
4.隨機性
由于新能源汽車在不同的氣候環境和道路條件下行駛,而且它的行駛工況又是動態變化的,因而汽車作為一個系統,是動態的、不確定的或隨機的。當某一懸架控制系統是為特定的載荷工況和道路條件設計時,那么在動負荷和路面不平度變化時,該懸架控制系統就不能保證車輛獲得良好性能。因此,電動汽車電子控制系統必須能適應外界條件的隨機變化。
下一篇: 全面解讀電動汽車電機基礎知識
")
")
")
")
")
")